深度优先搜索(DFS、深搜)和广度优先搜索(BFS、广搜)
- 作者: 潜入你的心脏做你的麦子
- 来源: 51数据库
- 2022-10-10
前边介绍了有关图的 4 种存储方式,本节介绍如何对存储的图中的顶点进行遍历。常用的遍历方式有两种:深度优先搜索和广度优先搜索。
深度优先搜索(简称“深搜”或DFS)
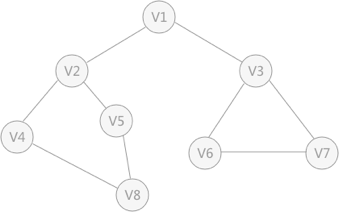
图 1 无向图
深度优先搜索的过程类似于树的先序遍历,首先从例子中体会深度优先搜索。例如图 1 是一个无向图,采用深度优先算法遍历这个图的过程为:
首先任意找一个未被遍历过的顶点,例如从 V1 开始,由于 V1 率先访问过了,所以,需要标记 V1 的状态为访问过;
然后遍历 V1 的邻接点,例如访问 V2 ,并做标记,然后访问 V2 的邻接点,例如 V4 (做标记),然后 V8 ,然后 V5 ;
当继续遍历 V5 的邻接点时,根据之前做的标记显示,所有邻接点都被访问过了。此时,从 V5 回退到 V8 ,看 V8 是否有未被访问过的邻接点,如果没有,继续回退到 V4 , V2 , V1 ;
通过查看 V1 ,找到一个未被访问过的顶点 V3 ,继续遍历,然后访问 V3 邻接点 V6 ,然后 V7 ;
由于 V7 没有未被访问的邻接点,所有回退到 V6 ,继续回退至 V3 ,最后到达 V1 ,发现没有未被访问的;
最后一步需要判断是否所有顶点都被访问,如果还有没被访问的,以未被访问的顶点为第一个顶点,继续依照上边的方式进行遍历。
根据上边的过程,可以得到图 1 通过深度优先搜索获得的顶点的遍历次序为:
V1 -> V2 -> V4 -> V8 -> V5 -> V3 -> V6 -> V7
所谓深度优先搜索,是从图中的一个顶点出发,每次遍历当前访问顶点的临界点,一直到访问的顶点没有未被访问过的临界点为止。然后采用依次回退的方式,查看来的路上每一个顶点是否有其它未被访问的临界点。访问完成后,判断图中的顶点是否已经全部遍历完成,如果没有,以未访问的顶点为起始点,重复上述过程。
深度优先搜索是一个不断回溯的过程。
采用深度优先搜索算法遍历图的实现代码为:
#include <stdio.h>
#define MAX_VERtEX_NUM 20 //顶点的最大个数
#define VRType int //表示顶点之间的关系的变量类型
#define InfoType char //存储弧或者边额外信息的指针变量类型
#define VertexType int //图中顶点的数据类型
typedef enum{false,true}bool; //定义bool型常量
bool visited[MAX_VERtEX_NUM]; //设置全局数组,记录标记顶点是否被访问过
typedef struct {
VRType adj; //对于无权图,用 1 或 0 表示是否相邻;对于带权图,直接为权值。
InfoType * info; //弧或边额外含有的信息指针
}ArcCell,AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM];
typedef struct {
VertexType vexs[MAX_VERtEX_NUM]; //存储图中顶点数据
AdjMatrix arcs; //二维数组,记录顶点之间的关系
int vexnum,arcnum; //记录图的顶点数和弧(边)数
}MGraph;
//根据顶点本身数据,判断出顶点在二维数组中的位置
int LocateVex(MGraph * G,VertexType v){
int i=0;
//遍历一维数组,找到变量v
for (; i<G->vexnum; i++) {
if (G->vexs[i]==v) {
break;
}
}
//如果找不到,输出提示语句,返回-1
if (i>G->vexnum) {
printf("no such vertex.\n");
return -1;
}
return i;
}
//构造无向图
void CreateDN(MGraph *G){
scanf("%d,%d",&(G->vexnum),&(G->arcnum));
for (int i=0; i<G->vexnum; i++) {
scanf("%d",&(G->vexs[i]));
}
for (int i=0; i<G->vexnum; i++) {
for (int j=0; j<G->vexnum; j++) {
G->arcs[i][j].adj=0;
G->arcs[i][j].info=NULL;
}
}
for (int i=0; i<G->arcnum; i++) {
int v1,v2;
scanf("%d,%d",&v1,&v2);
int n=LocateVex(G, v1);
int m=LocateVex(G, v2);
if (m==-1 ||n==-1) {
printf("no this vertex\n");
return;
}
G->arcs[n][m].adj=1;
G->arcs[m][n].adj=1;//无向图的二阶矩阵沿主对角线对称
}
}
int FirstAdjVex(MGraph G,int v)
{
//查找与数组下标为v的顶点之间有边的顶点,返回它在数组中的下标
for(int i = 0; i<G.vexnum; i++){
if( G.arcs[v][i].adj ){
return i;
}
}
return -1;
}
int NextAdjVex(MGraph G,int v,int w)
{
//从前一个访问位置w的下一个位置开始,查找之间有边的顶点
for(int i = w+1; i<G.vexnum; i++){
if(G.arcs[v][i].adj){
return i;
}
}
return -1;
}
void visitVex(MGraph G, int v){
printf("%d ",G.vexs[v]);
}
void DFS(MGraph G,int v){
visited[v] = true;//标记为true
visitVex( G, v); //访问第v 个顶点
//从该顶点的第一个边开始,一直到最后一个边,对处于边另一端的顶点调用DFS函数
for(int w = FirstAdjVex(G,v); w>=0; w = NextAdjVex(G,v,w)){
//如果该顶点的标记位false,证明未被访问,调用深度优先搜索函数
if(!visited[w]){
DFS(G,w);
}
}
}
//深度优先搜索
void DFSTraverse(MGraph G){//
int v;
//将用做标记的visit数组初始化为false
for( v = 0; v < G.vexnum; ++v){
visited[v] = false;
}
//对于每个标记为false的顶点调用深度优先搜索函数
for( v = 0; v < G.vexnum; v++){
//如果该顶点的标记位为false,则调用深度优先搜索函数
if(!visited[v]){
DFS( G, v);
}
}
}
int main() {
MGraph G;//建立一个图的变量
CreateDN(&G);//初始化图
DFSTraverse(G);//深度优先搜索图
return 0;
}以图 1 为例,运行结果为:
8,9
1
2
3
4
5
6
7
8
1,2
2,4
2,5
4,8
5,8
1,3
3,6
6,7
7,3
1 2 4 8 5 3 6 7
广度优先搜索
广度优先搜索类似于树的层次遍历。从图中的某一顶点出发,遍历每一个顶点时,依次遍历其所有的邻接点,然后再从这些邻接点出发,同样依次访问它们的邻接点。按照此过程,直到图中所有被访问过的顶点的邻接点都被访问到。
最后还需要做的操作就是查看图中是否存在尚未被访问的顶点,若有,则以该顶点为起始点,重复上述遍历的过程。
还拿图 1 中的无向图为例,假设 V1 作为起始点,遍历其所有的邻接点 V2 和 V3 ,以 V2 为起始点,访问邻接点 V4 和 V5 ,以 V3 为起始点,访问邻接点 V6 、 V7 ,以 V4 为起始点访问 V8 ,以 V5 为起始点,由于 V5 所有的起始点已经全部被访问,所有直接略过, V6 和 V7 也是如此。
以 V1 为起始点的遍历过程结束后,判断图中是否还有未被访问的点,由于图 1 中没有了,所以整个图遍历结束。遍历顶点的顺序为:
V1 -> V2 -> v3 -> V4 -> V5 -> V6 -> V7 -> V8
广度优先搜索的实现需要借助队列这一特殊数据结构,实现代码为:
#include <stdio.h>
#include <stdlib.h>
#define MAX_VERtEX_NUM 20 //顶点的最大个数
#define VRType int //表示顶点之间的关系的变量类型
#define InfoType char //存储弧或者边额外信息的指针变量类型
#define VertexType int //图中顶点的数据类型
typedef enum{false,true}bool; //定义bool型常量
bool visited[MAX_VERtEX_NUM]; //设置全局数组,记录标记顶点是否被访问过
typedef struct Queue{
VertexType data;
struct Queue * next;
}Queue;
typedef struct {
VRType adj; //对于无权图,用 1 或 0 表示是否相邻;对于带权图,直接为权值。
InfoType * info; //弧或边额外含有的信息指针
}ArcCell,AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM];
typedef struct {
VertexType vexs[MAX_VERtEX_NUM]; //存储图中顶点数据
AdjMatrix arcs; //二维数组,记录顶点之间的关系
int vexnum,arcnum; //记录图的顶点数和弧(边)数
}MGraph;
//根据顶点本身数据,判断出顶点在二维数组中的位置
int LocateVex(MGraph * G,VertexType v){
int i=0;
//遍历一维数组,找到变量v
for (; i<G->vexnum; i++) {
if (G->vexs[i]==v) {
break;
}
}
//如果找不到,输出提示语句,返回-1
if (i>G->vexnum) {
printf("no such vertex.\n");
return -1;
}
return i;
}
//构造无向图
void CreateDN(MGraph *G){
scanf("%d,%d",&(G->vexnum),&(G->arcnum));
for (int i=0; i<G->vexnum; i++) {
scanf("%d",&(G->vexs[i]));
}
for (int i=0; i<G->vexnum; i++) {
for (int j=0; j<G->vexnum; j++) {
G->arcs[i][j].adj=0;
G->arcs[i][j].info=NULL;
}
}
for (int i=0; i<G->arcnum; i++) {
int v1,v2;
scanf("%d,%d",&v1,&v2);
int n=LocateVex(G, v1);
int m=LocateVex(G, v2);
if (m==-1 ||n==-1) {
printf("no this vertex\n");
return;
}
G->arcs[n][m].adj=1;
G->arcs[m][n].adj=1;//无向图的二阶矩阵沿主对角线对称
}
}
int FirstAdjVex(MGraph G,int v)
{
//查找与数组下标为v的顶点之间有边的顶点,返回它在数组中的下标
for(int i = 0; i<G.vexnum; i++){
if( G.arcs[v][i].adj ){
return i;
}
}
return -1;
}
int NextAdjVex(MGraph G,int v,int w)
{
//从前一个访问位置w的下一个位置开始,查找之间有边的顶点
for(int i = w+1; i<G.vexnum; i++){
if(G.arcs[v][i].adj){
return i;
}
}
return -1;
}
//操作顶点的函数
void visitVex(MGraph G, int v){
printf("%d ",G.vexs[v]);
}
//初始化队列
void InitQueue(Queue ** Q){
(*Q)=(Queue*)malloc(sizeof(Queue));
(*Q)->next=NULL;
}
//顶点元素v进队列
void EnQueue(Queue **Q,VertexType v){
Queue * element=(Queue*)malloc(sizeof(Queue));
element->data=v;
element->next = NULL;
Queue * temp=(*Q);
while (temp->next!=NULL) {
temp=temp->next;
}
temp->next=element;
}
//队头元素出队列
void DeQueue(Queue **Q,int *u){
(*u)=(*Q)->next->data;
(*Q)->next=(*Q)->next->next;
}
//判断队列是否为空
bool QueueEmpty(Queue *Q){
if (Q->next==NULL) {
return true;
}
return false;
}
//广度优先搜索
void BFSTraverse(MGraph G){//
int v;
//将用做标记的visit数组初始化为false
for( v = 0; v < G.vexnum; ++v){
visited[v] = false;
}
//对于每个标记为false的顶点调用深度优先搜索函数
Queue * Q;
InitQueue(&Q);
for( v = 0; v < G.vexnum; v++){
if(!visited[v]){
visited[v]=true;
visitVex(G, v);
EnQueue(&Q, G.vexs[v]);
while (!QueueEmpty(Q)) {
int u;
DeQueue(&Q, &u);
u=LocateVex(&G, u);
for (int w=FirstAdjVex(G, u); w>=0; w=NextAdjVex(G, u, w)) {
if (!visited[w]) {
visited[w]=true;
visitVex(G, w);
EnQueue(&Q, G.vexs[w]);
}
}
}
}
}
}
int main() {
MGraph G;//建立一个图的变量
CreateDN(&G);//初始化图
BFSTraverse(G);//广度优先搜索图
return 0;
}
例如,使用上述程序代码遍历图 1 中的无向图,运行结果为:
8,9
1
2
3
4
5
6
7
8
1,2
2,4
2,5
4,8
5,8
1,3
3,6
6,7
7,3
1 2 3 4 5 6 7 8
总结
本节介绍了两种遍历图的方式:深度优先搜索算法和广度优先搜索算法。深度优先搜索算法的实现运用的主要是回溯法,类似于树的先序遍历算法。广度优先搜索算法借助队列的先进先出的特点,类似于树的层次遍历。

